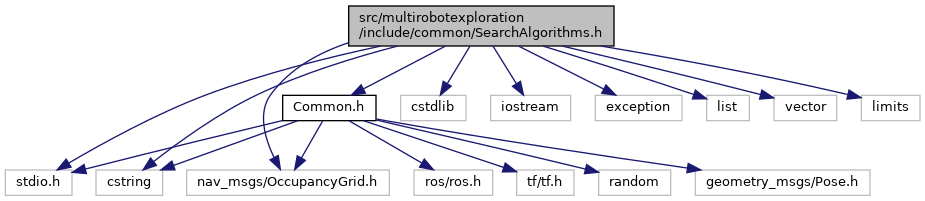
#include <stdio.h>
#include <cstring>
#include <cstdlib>
#include <iostream>
#include <exception>
#include <list>
#include <vector>
#include <limits>
#include "nav_msgs/OccupancyGrid.h"
#include "Common.h"
Go to the source code of this file.
|
| void | sa::InitOccFrom (nav_msgs::OccupancyGrid &rInput, nav_msgs::OccupancyGrid &rOutput) |
| |
| bool | sa::IsInBounds (nav_msgs::OccupancyGrid &rInput, Vec2i &rPos) |
| |
| bool | sa::CheckAny (nav_msgs::OccupancyGrid &rInput, const Vec2i &rStart, const Vec2i &rEnd, const int &rVal) |
| |
| void | sa::ComputePath (nav_msgs::OccupancyGrid &rOcc, const Vec2i &rStart, const Vec2i &rEnd, std::list< Vec2i > &rOutPath) |
| |
| void | sa::ComputePathWavefront (nav_msgs::OccupancyGrid &rInput, const Vec2i &rStart, const Vec2i &rEnd, std::list< Vec2i > &rOutPath) |
| |
| void | sa::ComputeFrontiers (nav_msgs::OccupancyGrid &rInput, nav_msgs::OccupancyGrid &rOutput, std::vector< Vec2i > &rFrontiers) |
| |
| void | sa::ComputeClusters (nav_msgs::OccupancyGrid &rFrontiersMap, std::vector< Vec2i > &rFrontiers, std::vector< std::vector< Vec2i >> &rOutClusters) |
| |
| Vec2i | sa::ClosestFrontierCluster (const Vec2i &rPos, std::vector< Vec2i > &rCluster) |
| |
| Vec2i | sa::MedianFrontierCluster (const Vec2i &rPos, std::vector< Vec2i > &rCluster) |
| |
| void | sa::ComputeCentroids (const Vec2i &rPos, std::vector< std::vector< Vec2i >> &rClusters, std::vector< Vec2i > &rOutCentroids) |
| |
| void | sa::ComputeAverageCentroids (const Vec2i &rPos, std::vector< std::vector< Vec2i >> &rClusters, std::vector< Vec2i > &rOutCentroids) |
| |
 1.8.17
1.8.17